
一、转向系统概览
汽车转向系统,作为汽车行驶过程中的关键组成部分,旨在改变或维持汽车的行驶方向,无论是前进还是倒退。这一系统涵盖了多种类型的装置,共同协作以确保汽车能够顺畅、精准地转向。其分类及作用如下:
二、转向系统概览
汽车转向系统,作为汽车行驶过程中的重要环节,负责改变或维持汽车的行驶方向。它涵盖了机械转向系统和动力转向系统两大类,本文将主要聚焦于机械转向系统的介绍。
机械转向系统主要由转向操纵机构、转向器和转向传动机构三大部分组成。其中,转向器是核心部件,它负责将方向盘的旋转运动转化为齿轮齿条的直线运动,从而实现汽车的转向。此外,转向操纵机构包括方向盘、快拆器等部件,负责接收驾驶者的转向指令;而转向传动机构则包括转向横拉杆、U型叉等,负责将转向器的运动传递到车轮,实现汽车的实际转向。
另外,赛车转向系统的组成更为复杂,除了上述的转向器、转向操纵机构和转向传动机构外,还包括齿轮、齿条、弹簧等众多部件。而转向器的类型也多种多样,如齿轮齿条式转向器、循环球式转向器等,它们各有特点,适应不同的赛车需求。
此外,转向梯形也是转向系统中的重要组成部分。它主要分为整体式和断开式两种类型。整体式转向梯形常用于非独立悬架的汽车上,其结构简单、调整前束容易、制造成本低;但缺点是侧转向轮在上下跳动时,会影响另一侧转向轮的运动。因此,在实际应用中,需要根据汽车的具体需求和性能要求来选择合适的转向梯形类型。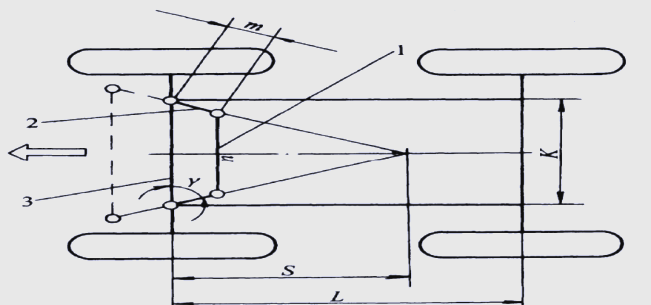
断开式转向梯形,常用于配备独立悬架的汽车,其显著优势在于能够与独立悬架协同工作,确保两侧车轮在跳动时互不干扰。这种设计使得转向横拉杆得以断开,从而为布置提供了更大的灵活性。然而,随之而来的问题是杆系增多导致结构变得复杂,容易产生间隙,进而可能影响传动效率。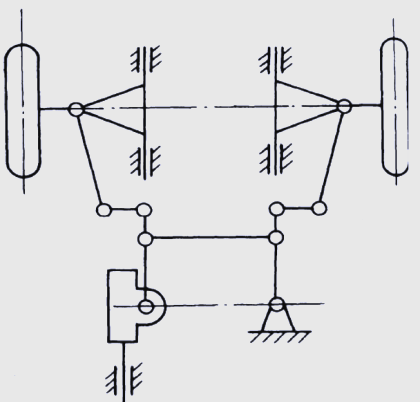
三、阿克曼梯形
阿克曼转角的原理:
阿克曼原理基于几个假设条件:转向轮定位角度为零、行走系统为刚性且汽车行驶过程中无侧向力。其核心观点是,在转弯时,车辆的所有车轮都围绕一个共同的中心点转动,这样轮胎与地面之间的摩擦被最小化,轮胎处于纯滚动状态。对于常见的两轴乘用车而言,前轮作为转向轮,在转弯时,两个前转向轮的转向中心与后轴轴线的延长线会相交于一点,这恰好符合阿克曼转向的原理。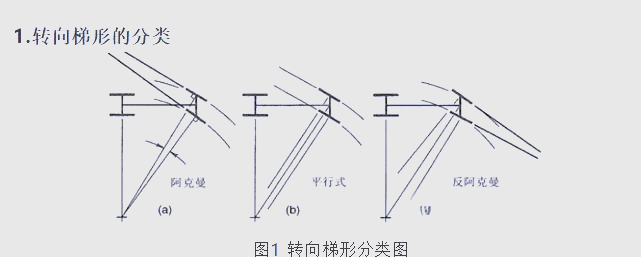
阿克曼转向梯形:
在转向时,阿克曼转向梯形呈现出一种特定的几何关系。具体来说,内侧车轮的转角会大于外侧车轮,而且两前车轮的轴线交叉点始终位于后轴的延长线上。这种设计确保了所有车轮都能在无滑动的情况下自由滚动,从而优化了操控性能。
平行转向梯形:
与此相对,平行转向梯形在转向时则呈现出两前轮轴线平行的特点,它们永远不会有交点。这种设计在卡车和客车上较为常见。
反阿克曼转向梯形:
另外,反阿克曼转向梯形在转向时则表现出外侧车轮转角大于内侧的特点,且其内外轮转角差与阿克曼转向梯形相等。这种设计主要应用于侧向加速度较大的车辆,如赛车,旨在充分发挥外侧前轮的侧向力。
转向节臂设计:
转向节臂作为转向系统中的核心部件,其设计质量直接影响到整个系统的指向性和效率。在设计中,需要综合考虑车重、轴距、轮距、轮胎数据以及主销倾角等多项因素。通过合理的节臂长度和方向盘直径的匹配,可以获得适宜的方向盘手力和舒适的驾驶体验。同时,静力学分析也是必不可少的环节,以确保转向节臂的可靠性。
阿克曼梯形在转向节臂上的应用:
常规汽车前轮的阿克曼梯形通常通过转向节臂来实现。梯形臂狡点与前轮轴线以及转向轴线的夹角共同构成了阿克曼梯形的几何关系。这种设计使得车辆在转弯时能够更加灵活自如。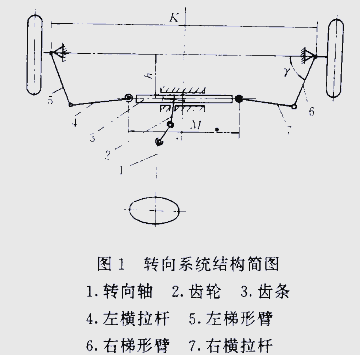
转向节臂在转向轴线上的布局考量:
在汽车的转向系统中,转向节臂的布置至关重要。通常情况下,它被设计成与转向轴线相连结,以确保车辆在转弯时的稳定性和灵活性。然而,由于轮边结构的复杂性和空间限制,理想的布置位置往往难以实现,特别是在前轮独立悬架和双叉臂结构的设计中。此外,转向节臂的位置还会对后续的横拉杆、转向机等部件的位置产生影响,因此,在选择位置时需要综合考虑多种因素。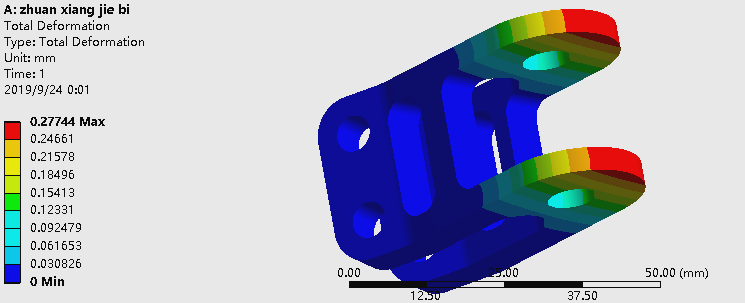
四、可调节横拉杆及其与转向机链接的设计与选点
可调节横拉杆的构造主要包括钢管、调节螺母、防松螺母、鱼眼轴承以及塞打螺栓螺母和螺栓垫片等部件。通过鱼眼轴承的正反螺纹设计,可以实现横拉杆长度的灵活调整,从而满足不同的转向需求。同时,横拉杆与转向机的链接绞点设计与选点也是关键环节,需要综合考虑车辆的性能、空间布局以及制造工艺等因素。
关于断开式转向系统的设计,特别是断开点的选择,是至关重要的。在我们的赛车中,由于采用了独立悬架,因此转向梯形选择了断开式设计。这种设计的好处在于,它与前轮的独立悬架协同工作,确保在一侧车轮上下跳动时,不会对另一侧车轮造成影响。而横拉杆上断开点的位置,则与独立悬架的具体形式紧密相关。当采用双横臂独立悬架时,我们通常借助图解法(基于三心定理)来精确确定断开点的位置,如图所示。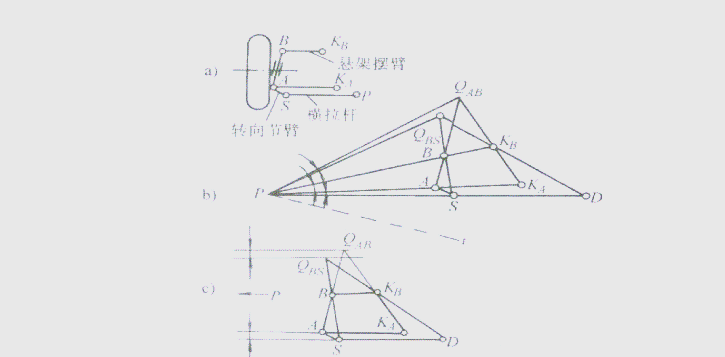
1、首先,我们需要延长KBB与KAA,使其交于立柱AB的瞬心P点,并从P点作出直线PS。这里的S点代表转向节臂球销中心在悬架杆件(双横臂)所在平面上的投影。在进行运动分析时,应确保悬架摇臂的轴线斜置,并选择垂直于摇臂轴的平面作为当量平面。
2、接下来,我们延长直线AB与KAKB,使其交于QAB点,并连接PQAB直线。
3、然后,连接S和B点,并延长直线SB。
4、为了确定断开点的位置,我们需要作直线PQBS,使得直线PQAB与PQBS之间的夹角等于直线PKA与PS之间的夹角。同时,当S点低于A点时,PQBS线应位于PQAB线的下方。
5、最后,我们延长PS与QBSKB,找到它们的交点D。这个D点便是横拉杆铰接点(即断开点)的理想位置。
接下来,我们进行三维空间动态跳动来确定断开点。首先,在悬架的基础上进行转向操作,明确悬架的上下摆臂、转向支柱以及减震器的位置。然后,根据这些硬点位置,在三维空间中模拟悬挂的跳动过程,并选取适当的铰点位置。这样,我们就能更准确地确定横拉杆的铰接点(即断开点)了。
2. 在确定梯形底角和转向节臂长度时,我们首先可以在二维空间进行模拟。这主要通过绘制转向特性曲线来完成,以判断所选参数是否合理。需要注意的是,二维模拟与三维校核之间可能存在差异,因此,虽然二维模拟结果可以提供参考,但最终还需通过三维校核来确保准确性。当然,在进行任何模拟或校核之前,我们都需要先确定转向节臂的长度和梯形底角这两个关键参数。
五、齿轮齿条转向机的设计
在确定了手力大小、转向节臂位置及断开点位置后,我们可以进一步推导出转向机的长度,这一长度不仅影响了转向机的布置,还对车辆的操控性能有着至关重要的影响。接下来,结合所需的最小转弯半径,我们可以计算出齿条的行程,从而确定转向机的行程范围。同时,通过方向盘的最大转动角度,我们可以得出齿轮的设计数据,进而通过齿轮与齿条的精确配合,得到一系列关键的转动数据,以确保转向系统的顺畅运行。
六、转向中间轴的设计
在考虑了车手的位置、座舱空间等因素后,我们需要为转向中间轴找到合适的布置方案。这一设计过程旨在确保中间轴既安全又可靠,同时满足车辆的性能需求。可能采用的布置方式包括单万向节、无万向节以及等速万向节等,具体选择需根据实际情况而定。


全部评论 (0)