
电子稳定控制ESC系统简介
R140法规的适用范围与定义
R140对ESC系统的具体要求
ESC系统的测试条件依据R140规定
ESC系统的测试流程详解
- 轮胎充气
- 报警灯功能检查(上电自检)
在遵循R140法规进行ESC系统测试时,首先需要确保车辆轮胎已充气至制造商推荐的冷充气压力,这一信息通常可在车辆标牌或轮胎充气压力标签上找到。接下来,进行报警灯功能检查,这包括在车辆静止且点火系统处于特定位置时,切换点火开关至“打开”(运行)位置或相应的报警灯检查模式。在此过程中,应观察ESC故障报警灯是否点亮,以验证报警灯功能的正常性。同时,若车辆配备了“ESC关闭”报警灯,也应检查其是否在适当情况下点亮,以验证关闭灯功能的完好性。请注意,公共空间显示的弹窗报警信息无需在此次测试中进行检查。
3 ESC Off控制检查
对于配备“ESC Off”功能的车辆,在车辆静止且点火系统处于“Lock”或“Off”状态时,将点火系统切换至“On”(运行)位置。随后启动“ESC Off”功能,并确认“ESC Off报警灯”是否能够正常点亮。
接着,将点火系统再次切换至“Lock”或“Off”位置,然后再切换回“On”(运行)位置,验证“ESC Off报警灯”是否能够顺利熄灭,这表示ESC系统已成功上电并自恢复。
4 制动调节
按照以下步骤对车辆制动器进行调节:
(a)以56公里/小时的速度进行十次停车操作,确保平均减速达到约5g;
(b)在紧接着的十次停车之后,以72公里/小时的速度进行三次大减速度停车;
(c)执行(b)中的停车操作时,需在制动踏板上施加足够的力度,使车辆的防抱死制动系统(ABS)在每次制动事件的大部分时间内保持运行;
(d)完成(b)中的最后一次停车后,让车辆以72公里/小时的速度行驶五分钟,以便刹车系统能够充分冷却。
5 轮胎打磨
在开始第6段和第9段的测试之前,需要对轮胎进行打磨,以确保其达到最佳的工作状态。具体操作如下:
(a) 弯道行驶:让测试车辆在直径为30米的圆圈内行驶,先顺时针方向转三圈,再逆时针方向转三圈。在行驶过程中,应保持车速使得横向加速度ay维持在5~6g左右,即大约32公里每小时。
(b) 双移线测试:采用频率为1Hz的正弦转向模式,使峰值方向盘角度振幅对应于5~5g的峰值横向加速度。车速设定为56公里每小时,并连续进行四次双移线测试,每次执行10个周期的正弦转向循环。
(c) 增强转向幅度:在最后一次双移线的最后一个周期中,方向盘的角度振幅应为其他周期的两倍。确保弯道和双移线之间的最大时间间隔不超过五分钟。
完成上述轮胎打磨步骤后,即可进行后续的测试。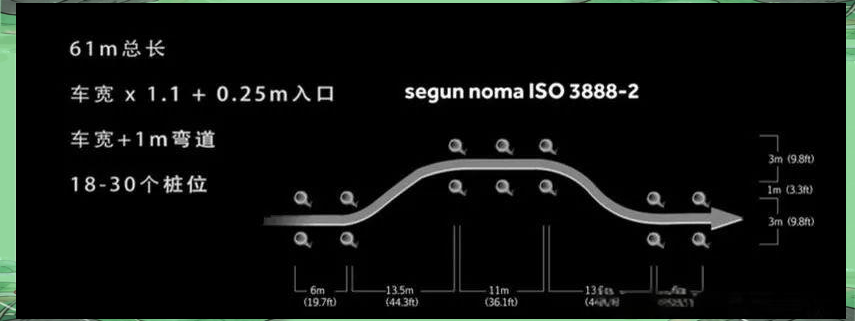
7 轮胎打磨的再次执行
在确定了数量A之后,且不更换轮胎的前提下,于第9段的带驻留正弦试验开始之前,需再次执行第5段中所述的轮胎调节步骤。此外,第6段的缓慢增加转向试验完成后,应在两小时内启动首个带驻留正弦试验。
8 确认ESC系统激活状态
通过观察“ESC故障”和“ESC Off”(如提供)报警灯是否点亮,来确认ESC系统是否已启用。
9 正弦驻留测试
在接下来的测试中,车辆将采用7Hz的正弦波转向模式进行两个系列的测试运行。从第二个峰值振幅开始,将进行500毫秒的正弦驻留测试。在这两个系列中,一个将逆时针转向用于前半个循环,而另一个则采用顺时针转向。在每次测试运行之间,允许车辆静止冷却5至5分钟。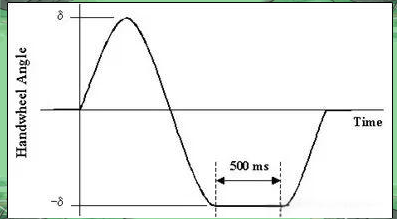
1 转向运动将在车辆以80±2km/h的高速滑行状态下启动。
2 每个测试系列的初始转向幅度被设定为5A,其中A代表第6段中确定的方向盘角度。
3 在每一系列的测试过程中,转向幅度会逐次增加5A,但需确保不会超过第4段所规定的最终运行转向幅度。
4 每个测试系列的最后运行,其转向幅度将设定为5A或270°,以较大值为准,但5A的计算结果必须小于或等于300°。若任何5A的增量(直至5A)超过300°,则最终转向幅度需调整为300°。
5 完成两个系列的测试运行后,将依据第11段的规定对偏航角速度和横向加速度数据进行后续处理。
10 ESC故障检测
1 通过切断电源与ESC组件的连接,或在车辆电源关闭状态下断开ESC组件间的电气连接,来模拟一个或多个ESC故障。请注意,在模拟故障时,报警灯和/或可选ESC系统控制的电气连接不得断开。
2 在车辆静止且点火锁定系统处于“锁定”或“关闭”状态时,将点火锁定切换至“启动”位置并启动发动机。随后,将车辆向前行驶至48±8km/h的速度,并在此速度下执行至少一次平稳的左右转弯机动,同时验证方向稳定性,以及一次制动操作。转弯机动必须在发动机启动后30秒内开始,并在接下来的两分钟内完成。在这些机动结束后,确认ESC故障指示灯是否按照第4段的规定点亮。
3 在完成上述操作后,将车辆停止,将点火锁定系统切换至“关闭”或“锁定”状态,并等待五分钟。随后,再次将点火锁定系统切换至“启动”位置并启动发动机。此时,应验证ESC故障指示灯是否再次亮起,以发出故障报警信号,并确保在发动机运行期间或故障得到纠正之前,该故障报警指示灯保持点亮状态。
4 将点火锁定系统切换回“关闭”或“锁定”位置,将ESC系统恢复至正常运行状态。然后,重新启动发动机并执行第2段中所述的操作。在此过程中或之后,应验证ESC故障报警是否立即熄灭。
11 数据后处理-性能指标的计算
在进行数据后处理时,应依据第1至8段的规定,对横摆角速度和横向加速度等数据进行测量和计算。这些处理步骤旨在确保数据的准确性和可靠性,从而为性能指标的计算提供有力支持。
4 方向盘转速是通过微分过滤后的方向盘角度数据来计算的。随后,采用1秒移动运行平均滤波器对方向盘速度数据进行平滑处理。
5 在处理横向加速度、横摆角速度和方向盘角度数据时,需应用定义的“归零范围”进行归零操作。具体方法如下:
(a)利用第4段中描述的方法,首先找出方向盘转速超过75°/s的瞬间,并确保此后方向盘速率至少保持200ms以上。若条件不满足,则继续寻找下一个满足条件的瞬间,并重复进行200ms有效性检查,直至条件最终满足。
(b)“归零范围”被定义为方向盘速度超过75°/s的瞬间之前的0秒时间段,即该瞬间标志着“归零范围”的结束。
6 转向开始(BOS)的时刻被定义为在“归零范围”结束后,过滤和归零的方向盘角度数据首次达到-5°(逆时针转向输入)或+5°(顺时针转向输入)的那一刻。该时间点通过插值法获取。
7 转向完成(COS)的时间点则是指正弦驻留转向操作完成后,方向盘角度归零的时刻。同样,该时间点也通过插值法获得。
8 第二个横摆角速度峰值指的是方向盘反转时产生的首个局部横摆角速度峰值。此外,还需在COS后的000秒和750秒处通过插值法确定横摆角速度的值。
9 横向速度是通过整合校正、滤波和归零的横向加速度数据来计算的,其中BOS点的横向速度被设定为零。进而,通过积分零横向速度来计算横向位移,并确定BOS点的横向位移为零。实际测量时,在BOS点后的07秒进行横向位移的测量,并通过插值法得出精确结果。
仿真工具与验证
1 动态稳定性的仿真验证
为了验证电子稳定控制ESC系统的有效性,可以利用计算机仿真工具进行模拟。车辆制造商应通过模拟本法规第9段中规定的动态机动操作,向型式认证机构或技术服务部门展示其车辆的稳定性状况。
仿真应作为验证车辆稳定性性能的重要手段,通过以下方式展现:
(a) 在正弦转向输入持续1秒后,观察并记录横摆角速度的变化;
(b) 在完成带有驻留的正弦转向输入后的75秒,再次测量横摆角速度;
(c) 记录车辆重心在其初始直线路径上的横向位移。
进行仿真时,应采用经过充分验证的建模和仿真工具,并依据本法规第9段中规定的动态机动操作,以及第4段中设定的测试条件来进行。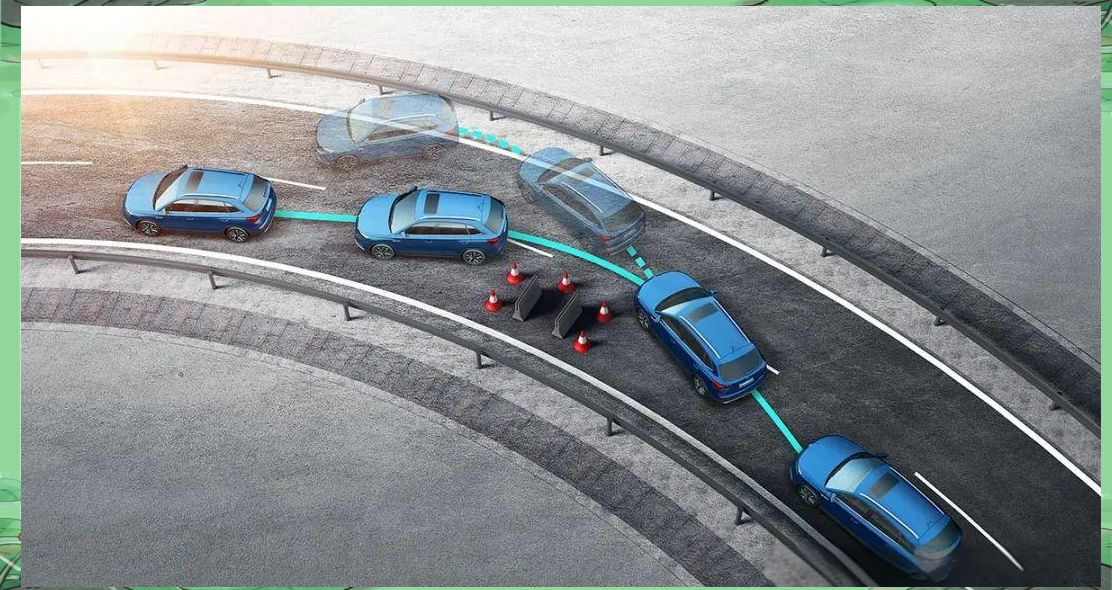
2 动态稳定性仿真工具及其验证
1 仿真工具规格
模拟方法应综合考虑影响车辆方向和侧倾运动的关键因素。典型模型可能包含以下车辆参数,以显式或隐式方式呈现:
(a)轴/轮;
(b)悬架;
(c)轮胎;
(d)底盘/车身;
(e)动力总成/传动系统,如适用;
(f)制动系统;
(g)有效载荷。
车辆稳定性函数应融入仿真模型中,可通过以下途径实现:
(a)利用仿真工具的子系统(如软件模型);或者
(b)采用硬件在环HIL配置的电子控制箱。
2 仿真工具的验证
所采用的建模和仿真工具的有效性,应通过与实际车辆测试结果的对比来确认。用于验证的测试需遵循本法规第9段所述的动态机动要求。
在试验过程中,应依据IS0 1501:2005《乘用车的一般条件》或IS0 1502:2002《重型车辆和公共汽车的一般条件》(视车辆类型而定),记录或计算以下运动变量:
(a)方向盘角度;
(b)纵向速度;
(c)侧倾角或横向速度(可选);
(d)向加速度(可选);
(e)横向加速度;
(f)横向角速度;
(g)侧倾角速度;
(h)俯仰角速度;
(i)侧倾角;
(j)俯仰角。
目标是确保模拟的车辆行为和操作与实际车辆测试中所观察到的保持一致。当仿真工具的输出与本法规第9段中规定的动态机动期间的实际测试结果相吻合时,即可认为该仿真工具已经过验证。在比较过程中,应特别关注仿真和实际车辆测试中车辆稳定性函数的激活和顺序关系。
此外,还需根据参考车辆和模拟车辆配置之间的物理参数差异,在仿真中进行相应调整。最后,应编制仿真工具测试报告,并将其作为车辆批准报告的附件之一。


全部评论 (0)