01 背景介绍
作为科技热门之一的无人驾驶技术,目前在新能源汽车领域的应用可谓是愈发广泛。而在见识过不同底盘的ROS小车之后,有些同学找到我想问:有没有哪款小车更适合学习无人驾驶呢?

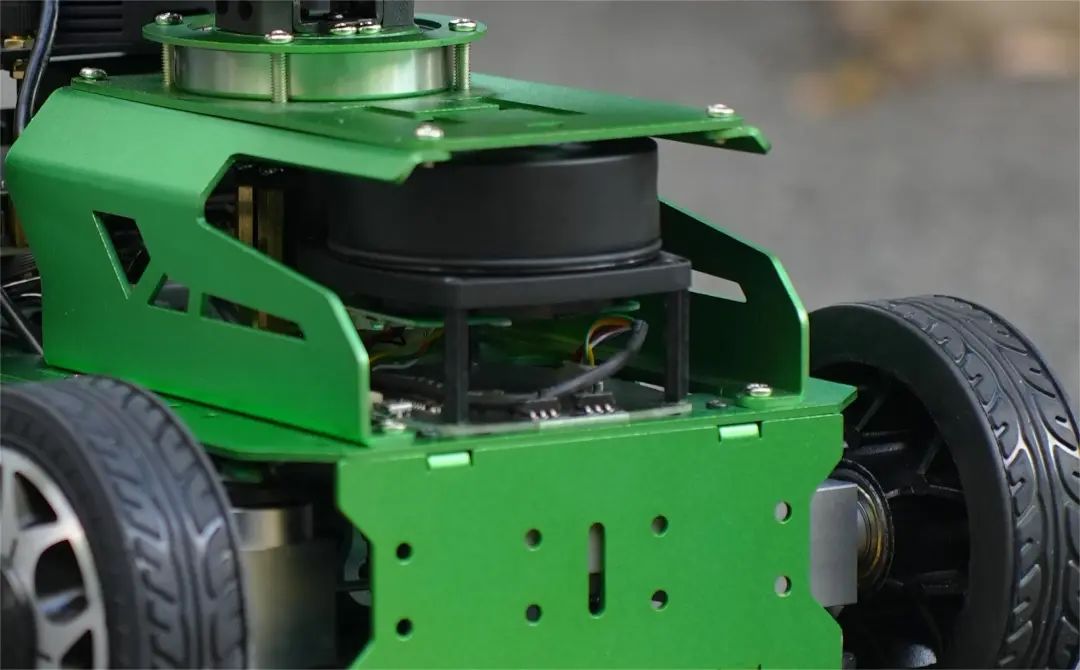
02 开箱展示



03 上手体验

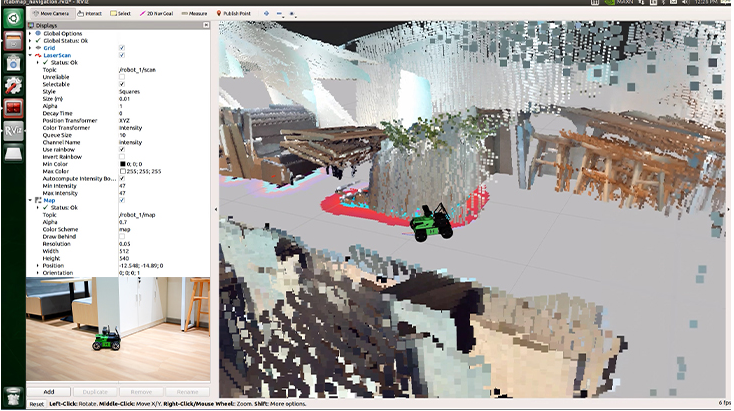
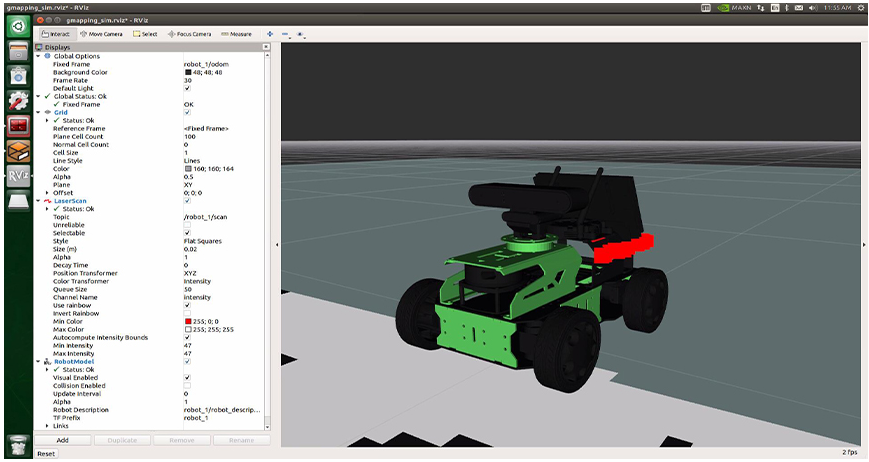
激光雷达
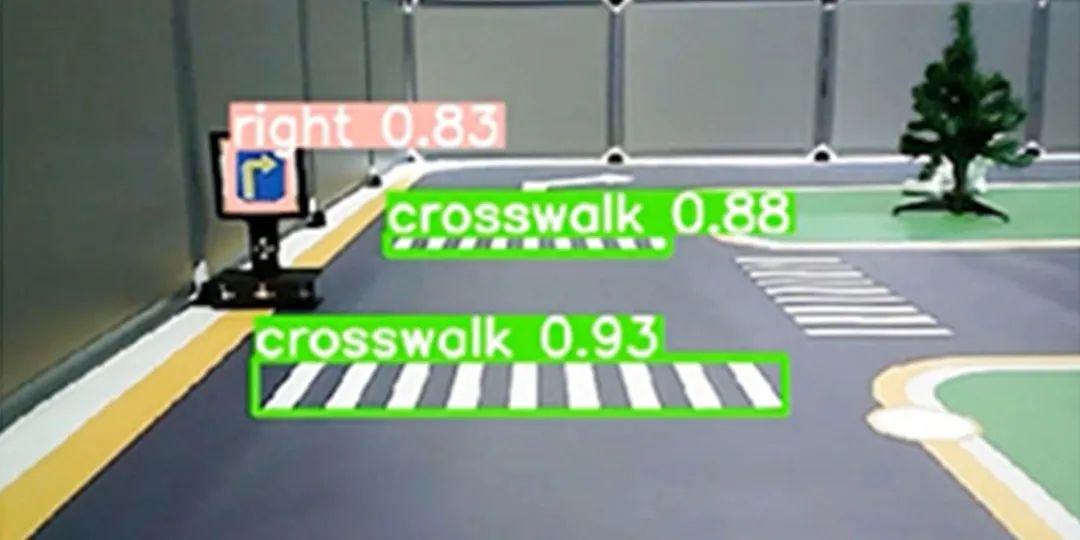
这些都是无人驾驶的实现基础,也都带有对应的课程。而丰富课程给我的感觉则是整个学习过程一下变得轻松起来,很多不懂的地方都有迹可循,这种感觉真是太棒了。





04 总结


01 背景介绍
作为科技热门之一的无人驾驶技术,目前在新能源汽车领域的应用可谓是愈发广泛。而在见识过不同底盘的ROS小车之后,有些同学找到我想问:有没有哪款小车更适合学习无人驾驶呢?
02 开箱展示
03 上手体验
激光雷达
这些都是无人驾驶的实现基础,也都带有对应的课程。而丰富课程给我的感觉则是整个学习过程一下变得轻松起来,很多不懂的地方都有迹可循,这种感觉真是太棒了。
04 总结


全部评论 (0)