
引言
在之前的文章中,我们深入探讨了汽车360环视拼接技术的原理与实现。如今,随着科技的持续进步和处理器图像处理能力的不断增强,540°全景影像技术崭新登场。这项技术不仅继承了传统360影像的全方位视野,更增添了透明底盘的独特功能,从而为驾驶者提供了更为全面的驾驶辅助。
蔚来-透明底盘
透明底盘技术同样基于多摄像头系统,捕捉并实时拼接车辆四周影像,为驾驶者呈现一幅全景影像。这一技术不仅深化了我们对车辆周围环境的感知,更在保障驾驶安全、提升停车辅助等方面带来了显著的体验改善。接下来,我们将深入剖析汽车540全景影像技术中透明底盘的原理与实现,揭示其在推动汽车行业革新中的关键作用。
原理
1 案例解析
透明底盘技术的核心在于车体的移动与历史环视拼接360图像数据的融合。为了更直观地理解其工作原理,我们通过一个简单的示例来进行演示。首先,让我们来看一张示意图: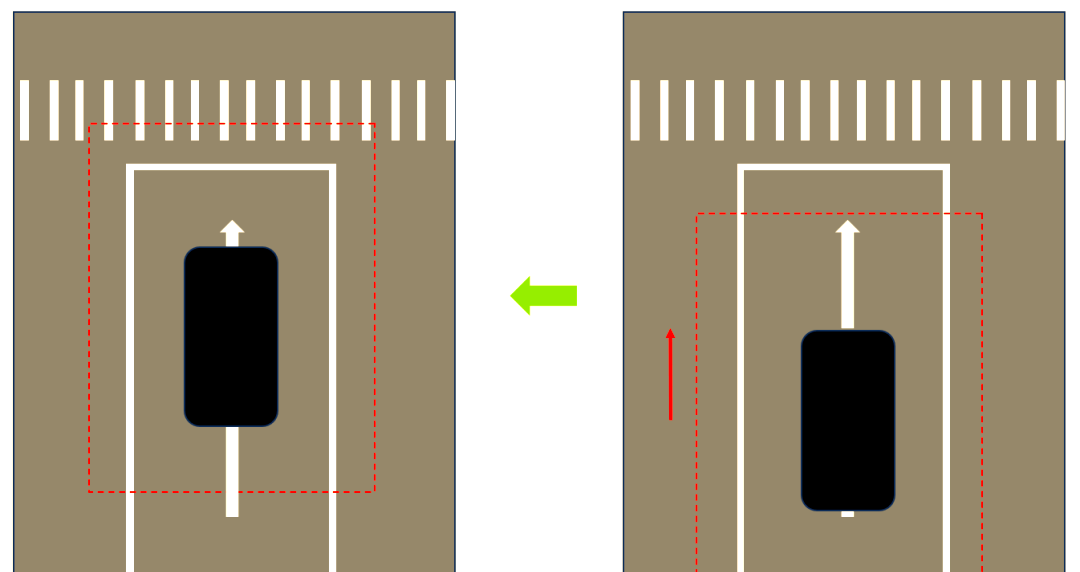
车体运动
在透明底盘技术的原理中,车体的移动与历史环视拼接360图像数据是关键。为了更具体地阐述这一过程,我们通过一个简单的示例来进行解析。设想车辆当前360环视所能覆盖的范围由红色虚线勾勒,而黑色部分则代表车体本身。当车体沿着红色箭头指示的方向单向运动时,其360图像在垂直方向上会产生偏移。具体来说,若车体在第1秒时从左图所示位置开始运动,并在第2秒时停止于右图所示位置,那么在第2秒时,相对于第1秒的360图像,其垂直偏移量(假设为N pixels)将如蓝色部分所示。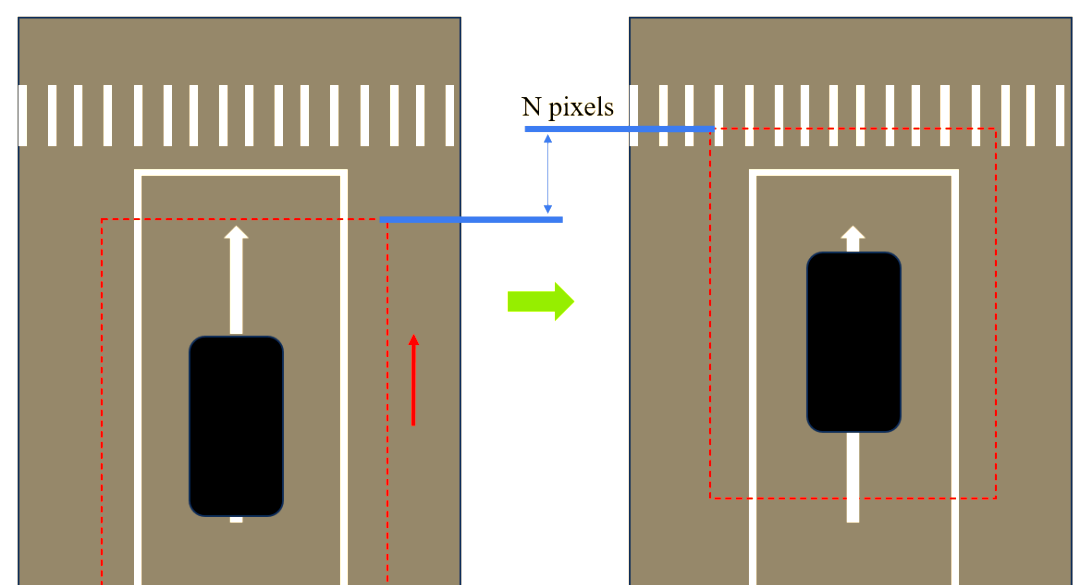
两帧间的差异
当我将第1秒的360度拼接图像整体下移N个像素时,第一帧中移动后世界坐标系内物体的位置,将与第2秒时的物体重合。为了更直观地展示这一变化,我们将第1秒的图像向下平移N个像素,并对比原始全景鸟瞰图与移动后的鸟瞰图,可以清晰地看到这种差异。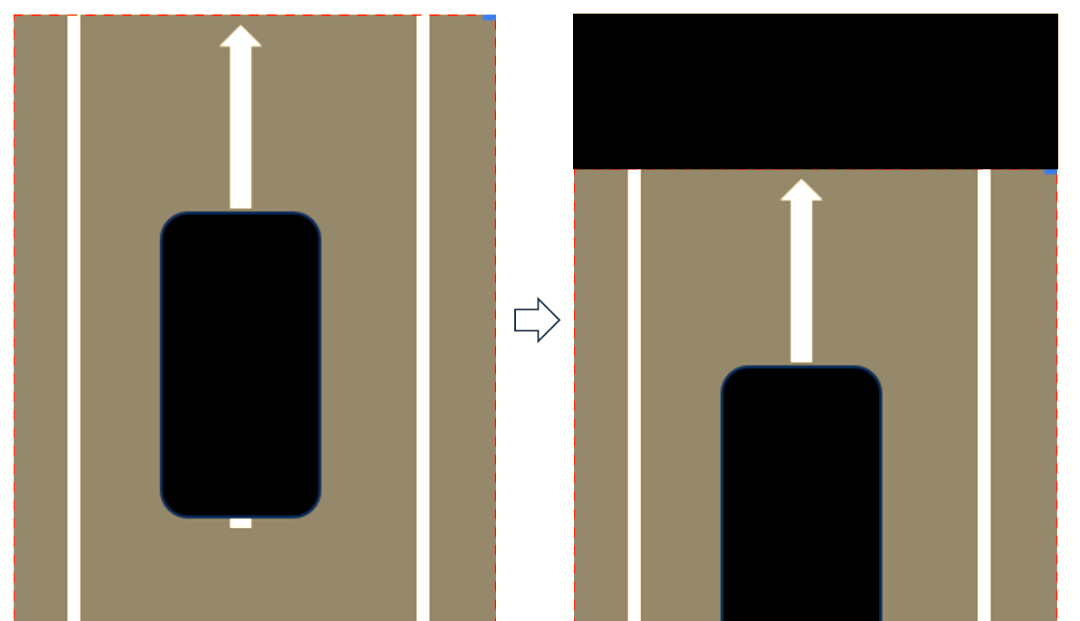
移动后的图像对比
接下来,我们将第1秒经过平移的图像(左侧)与第2秒的原始图像(右侧)进行对比展示: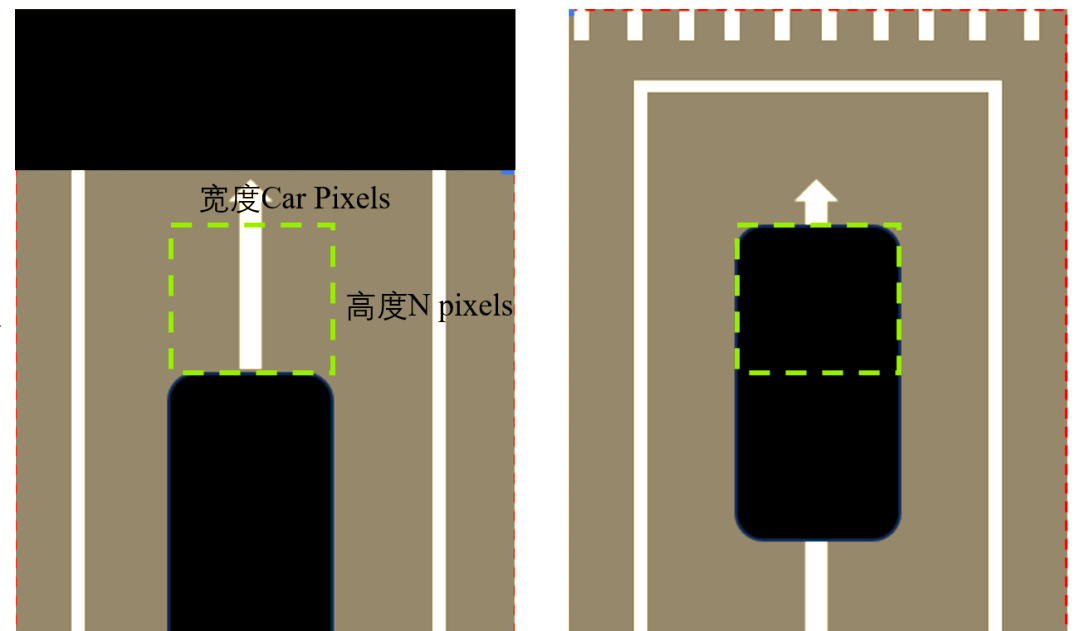
移动后对比
经过对比,读者或许已经发现,在移动后的图像中,绿色框所标示的高度为N pixels,宽度为黑色车宽pixels的区域,恰好对应着第2秒时汽车底部移动的位置。若将此部分图像融入第2秒合成的全景图中,其效果将如下所示: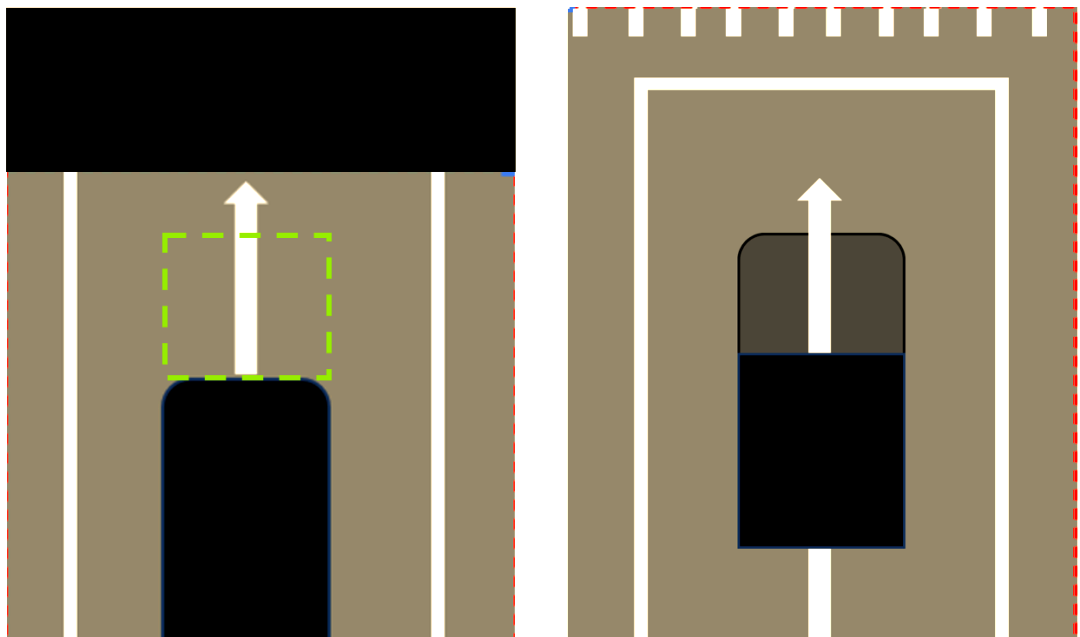
合成全景图
当汽车持续前行,我们只需重复上述过程,不断更新历史图像,便能捕捉到最新的底盘影像。然而,实际情况往往更为复杂。接下来,我们将深入探讨图像偏移的获取方法。
在汽车行驶过程中,360度全景图像主要发生两种类型的移动:
平移:图像在水平或垂直方向上的移动。
旋转:当汽车转弯时,图像会随之旋转。
为了描述这些移动,我们可以采用一个仿射变换矩阵。
注意,上述变换过程中并未涉及缩放,那么在实际的汽车环境中,我们如何获取这个变换矩阵呢?关键在于利用多种传感器,包括图像传感器、轮速传感器,以及汽车的角度测量传感器,如IMU(惯性测量单元)等。IMU用于测量汽车的角度变化,轮速传感器则负责测量x、y轴上的移动偏移量。将这些数据与图像传感器所测量的图像数据融合,即可得到仿射变换矩阵M。虽然这里的具体细节较为复杂,但感兴趣的朋友可以深入探索。
接下来,我们来看如何实现这个变换过程。首先,需要明确基本步骤。由于我们没有实际的汽车和IMU、轮速传感器等设备来进行实验,因此这里采用了一种替代方案——通过图像测量来获取图像变换矩阵。这一过程主要包括以下步骤: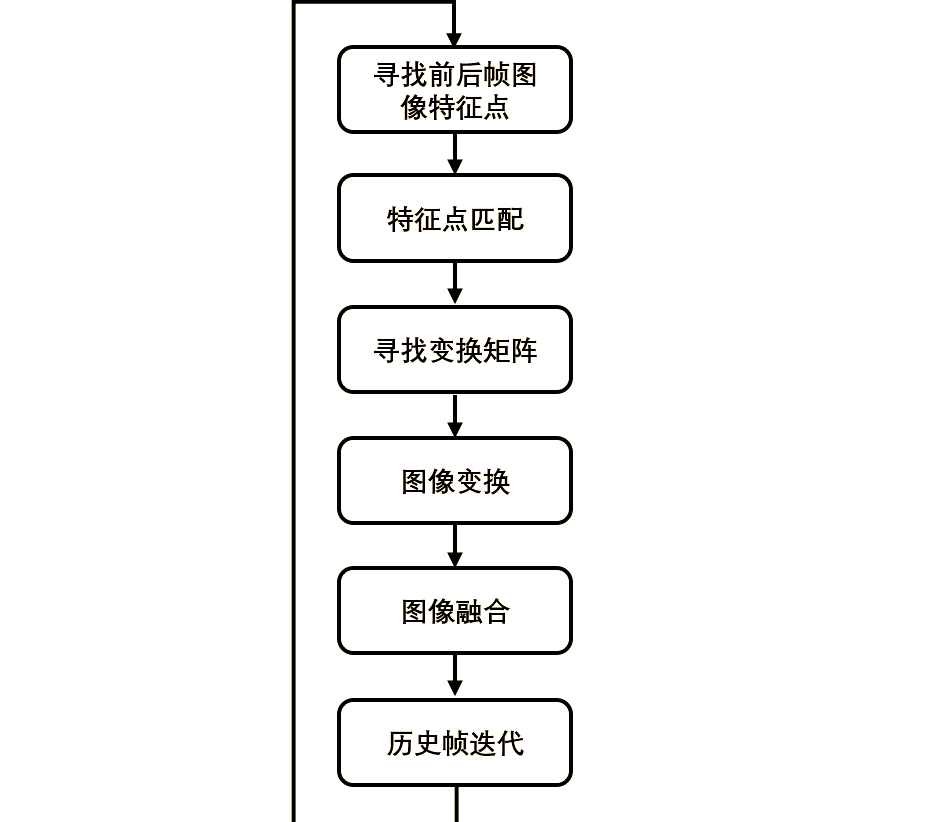
寻找特征点:在前后两幅全景图像中,利用OpenCV提供的SIFT、ORB等方法,我们可以有效地找到特征点。
特征点匹配:通过特定的匹配算法,我们能够得到两幅图像中匹配良好的特征点序列。
寻找变换矩阵:基于匹配好的特征点序列,我们可以进一步求得变换矩阵。
图像变换:利用上述变换矩阵,对上一帧的全景图像进行仿射变换。
图像融合:将当前全景图像的车底部分与经过变换的上一帧图像进行融合处理。
历史帧迭代:将融合后的图像加入到历史帧队列中。
重复以上流程,即可实现对全景图像的连续处理和优化。
2 效果展示
为了更直观地展示效果,我们选取了github开源素材中的一段进行测试,并截取了特征提取和匹配效果较好的部分进行演示。
透明底盘效果
结束语
在汽车智能化不断发展的今天,540全景影像系统已成为驾驶者的得力助手。通过多摄像头协同工作,该系统能实时监测并呈现车辆周围环境,为驾驶者带来更为安全、便捷的驾驶体验。其核心技术在于图像处理和实时拼接,从而形成一张无缝连接的全景画面,有效提升驾驶者对周围状况的感知能力,尤其在复杂交通场景和停车时显得尤为关键。这一技术的运用,让驾驶变得更加从容、愉悦。


全部评论 (0)